8 · PDHG for a conic program#
A huge family of problems are conic programs:
where \(\mathcal{K}\) is a convex cone — the nonnegative orthant (LP), the second-order cone (SOCP), or the PSD cone (SDP). The Primal–Dual Hybrid Gradient method (PDHG / Chambolle–Pock) solves these with three ingredients, each of which SpaceCore provides directly:
a linear operator \(A\) and its adjoint — a
LinOp;a projection onto the cone \(\mathcal{K}\) — for the orthant, the cone of squares of a Jordan-algebra space, projected with
spectral_apply;a dual update for the equality constraint.
We solve a tiny standard-form LP whose optimum we know, and watch PDHG walk a primal path across the probability simplex to the answer.
You will learn to assemble a saddle-point solver from a SpaceCore operator and a cone projection, with no dense KKT system.
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
import spacecore as sc
# A clean, consistent palette + style for every figure in the tutorials.
BLUE, INDIGO, CYAN = "#2563eb", "#4f46e5", "#0891b2"
PINK, AMBER, GREEN = "#db2777", "#d97706", "#059669"
SLATE, GRID = "#334155", "#e5e9f0"
mpl.rcParams.update({
"figure.figsize": (7.2, 4.2), "figure.dpi": 120, "savefig.dpi": 120,
"figure.facecolor": "white", "axes.facecolor": "white",
"axes.edgecolor": SLATE, "axes.linewidth": 1.0,
"axes.grid": True, "axes.axisbelow": True,
"grid.color": GRID, "grid.linewidth": 1.0,
"axes.spines.top": False, "axes.spines.right": False,
"axes.titlesize": 13, "axes.titleweight": "bold", "axes.titlecolor": SLATE,
"axes.labelcolor": SLATE, "axes.labelsize": 11,
"xtick.color": SLATE, "ytick.color": SLATE,
"xtick.labelsize": 10, "ytick.labelsize": 10, "font.size": 11,
"legend.frameon": False, "legend.fontsize": 10,
"lines.linewidth": 2.4, "lines.markersize": 6, "image.cmap": "magma",
})
mpl.rcParams["axes.prop_cycle"] = mpl.cycler(
color=[BLUE, PINK, GREEN, AMBER, INDIGO, CYAN])
print("spacecore", sc.__version__, "| numpy", np.__version__)
spacecore 0.4.0 | numpy 2.4.2
ctx = sc.Context(sc.NumpyOps(), dtype=np.float64)
ops = ctx.ops
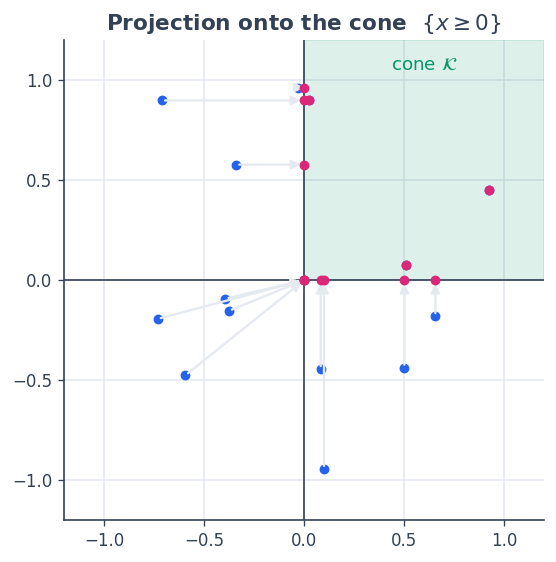
1 · The problem and the cone#
The feasible set is the probability simplex; since the objective is linear, the optimum is the cheapest vertex — here \(x^\star = (0,1,0)\) with value \(1\).
The cone \(\mathcal{K} = \mathbb{R}^3_{\ge 0}\) is the cone of
squares of an ElementwiseJordanSpace. Projection onto it is
\(\max(\cdot, 0)\), expressed through the Jordan spectral calculus.
A_mat = np.array([[1.0, 1.0, 1.0]])
b = ctx.asarray([1.0])
c = ctx.asarray([2.0, 1.0, 3.0])
X = sc.ElementwiseJordanSpace((3,), ctx) # primal lives in the nonnegative orthant
Y = sc.DenseVectorSpace((1,), ctx) # multiplier for the equality constraint
A = sc.DenseLinOp(ctx.asarray(A_mat), X, Y, ctx)
# Projection onto K = {x >= 0}, via the Jordan spectral map s -> max(s, 0)
proj_K = lambda x: X.spectral_apply(x, lambda s: ops.maximum(s, 0.0))
demo = ctx.asarray([0.7, -0.4, 0.2])
print("project (0.7, -0.4, 0.2) onto the orthant:", proj_K(demo))
project (0.7, -0.4, 0.2) onto the orthant: [0.7 0. 0.2]
# a picture of the cone projection in 2D
rng = np.random.default_rng(1)
E2 = sc.ElementwiseJordanSpace((2,), ctx)
pj2 = lambda v: E2.spectral_apply(v, lambda s: ops.maximum(s, 0.0))
pts = rng.uniform(-1, 1, size=(14, 2))
fig, ax = plt.subplots(figsize=(5.2, 5.2))
ax.axhspan(0, 1.2, xmin=0.5, color=GREEN, alpha=0.06)
ax.fill([0, 1.2, 1.2, 0], [0, 0, 1.2, 1.2], color=GREEN, alpha=0.08)
for p in pts:
q = np.asarray(pj2(ctx.asarray(p)))
ax.annotate("", xy=q, xytext=p, arrowprops=dict(arrowstyle="-|>", color=GRID, lw=1.4))
ax.scatter(*p, color=BLUE, s=24); ax.scatter(*q, color=PINK, s=24, zorder=5)
ax.axhline(0, color=SLATE, lw=1); ax.axvline(0, color=SLATE, lw=1)
ax.set_xlim(-1.2, 1.2); ax.set_ylim(-1.2, 1.2); ax.set_aspect("equal")
ax.set_title("Projection onto the cone $\\{x \\geq 0\\}$")
ax.text(0.6, 1.05, "cone $\\mathcal{K}$", color=GREEN, fontsize=11, ha="center")
plt.show()
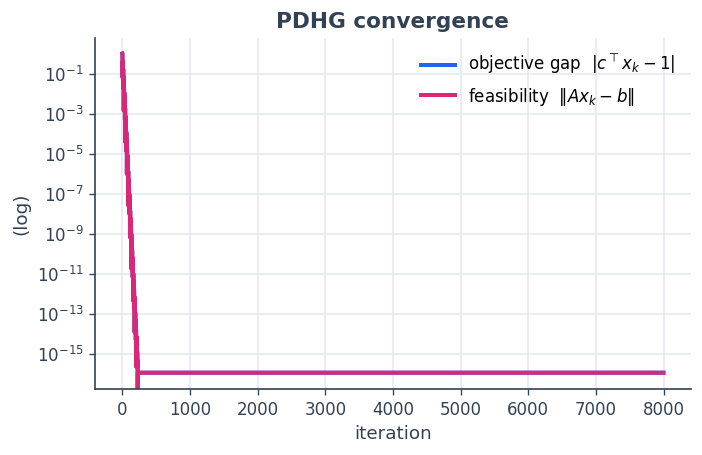
2 · The PDHG iteration#
PDHG alternates a primal step (gradient in \(c + A^\top y\),
then project onto \(\mathcal{K}\)), an over-relaxation, and a
dual step (drive \(Ax \to b\)). The operator’s adjoint
A.rapply supplies \(A^\top y\); the cone projection is the
primal proximal step.
L = float(np.linalg.norm(A_mat, 2)) # operator norm of A
tau = sigma = 0.9 / L # step sizes: tau*sigma*L^2 < 1
x = ctx.asarray(np.full(3, 1/3)) # start at the simplex centroid
y = Y.zeros()
x_star = np.array([0.0, 1.0, 0.0])
traj, obj_gap, feas = [np.asarray(x).copy()], [], []
for k in range(8000):
x_prev = x
x = proj_K(x - tau * (c + A.rapply(y))) # primal: step + cone projection
x_bar = 2.0 * x - x_prev # over-relaxation
y = y + sigma * (A.apply(x_bar) - b) # dual: enforce Ax = b
obj_gap.append(abs(float(ops.vdot(c, x)) - 1.0))
feas.append(float(Y.norm(A.apply(x) - b)))
if k % 40 == 0:
traj.append(np.asarray(x).copy())
traj = np.array(traj)
print("PDHG solution x :", np.round(np.asarray(x), 6))
print("objective cᵀx :", float(ops.vdot(c, x)), " (optimum = 1.0)")
print("feasibility ‖Ax−b‖:", feas[-1])
print("x ≥ 0 ? :", bool(np.all(np.asarray(x) >= -1e-12)))
PDHG solution x : [0. 1. 0.]
objective cᵀx : 0.9999999999999999 (optimum = 1.0)
feasibility ‖Ax−b‖: 1.1102230246251565e-16
x ≥ 0 ? : True
fig, ax = plt.subplots(figsize=(6.4, 3.8))
ax.semilogy(obj_gap, color=BLUE, label="objective gap $|c^\\top x_k - 1|$")
ax.semilogy(feas, color=PINK, label="feasibility $\\|Ax_k - b\\|$")
ax.set_title("PDHG convergence"); ax.set_xlabel("iteration"); ax.set_ylabel("(log)")
ax.legend(); plt.show()
3 · The path across the simplex#
Mapping each iterate to barycentric coordinates, we see PDHG start at the centroid and head to the cheap vertex \(x^\star=(0,1,0)\). The background shades the linear objective \(c^\top x\) — its straight level sets confirm the optimum must sit at a corner.
import matplotlib.tri as mtri
corners = np.array([[0.0, 0.0], [1.0, 0.0], [0.5, np.sqrt(3)/2]]) # triangle in 2D
def bary(x): # simplex → 2D
x = np.asarray(x); return x @ corners
# shade the objective over the simplex interior
s = rng.dirichlet(np.ones(3), size=4000)
pts2d = s @ corners
vals = s @ np.asarray(c)
fig, ax = plt.subplots(figsize=(6.2, 5.6))
tri = mtri.Triangulation(pts2d[:, 0], pts2d[:, 1])
ax.tricontourf(tri, vals, levels=18, cmap="magma", alpha=0.85)
ax.plot(*np.vstack([corners, corners[0]]).T, color=SLATE, lw=1.6)
P = bary(traj)
ax.plot(P[:, 0], P[:, 1], color=CYAN, lw=2.6, marker="o", ms=3, label="PDHG iterates")
ax.scatter(*bary(x_star), color=GREEN, s=240, marker="*", zorder=6, label="optimum $(0,1,0)$")
labels = ["$x_1$ (c=2)", "$x_2$ (c=1)", "$x_3$ (c=3)"]
for corner, lab in zip(corners, labels):
off = (corner - corners.mean(0)) * 0.16
ax.text(*(corner + off), lab, ha="center", va="center", fontsize=10, color=SLATE)
ax.set_aspect("equal"); ax.axis("off"); ax.legend(loc="upper right")
ax.set_title("PDHG path on the probability simplex\n(background = objective $c^\\top x$)")
plt.show()
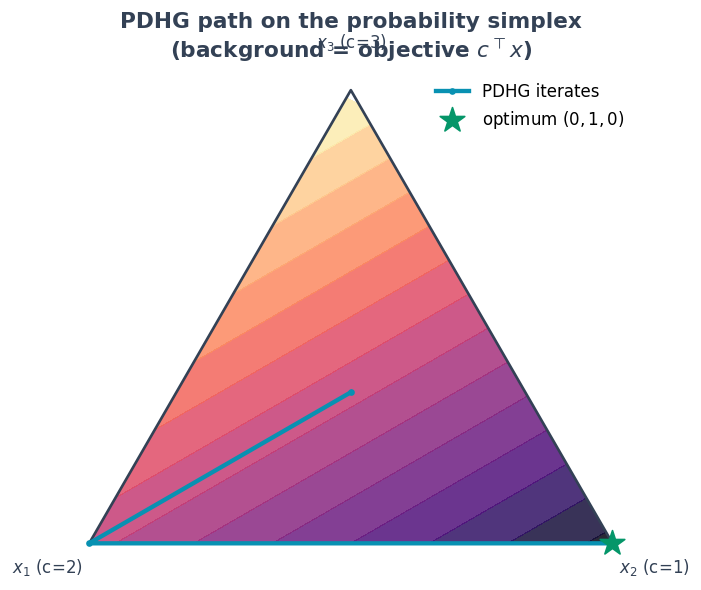
The iterates slide down the objective gradient and park at the \(x_2\) corner — the vertex with the smallest cost coefficient — exactly the LP optimum.
Other cones, same loop. Only the projection changes. For the second-order cone use the Lorentz projection; for the PSD cone use
sc.HermitianSpace(n).psd_proj, which clips the eigenvalues at zero. The operator \(A\), the adjointA.rapply, and the PDHG skeleton stay identical — which is the point of phrasing the whole thing in terms of spaces and operators.
Recap#
A conic program needs a linear operator, its adjoint, and a cone projection — PDHG glues them into a primal–dual saddle-point solver.
SpaceCore supplies \(A\) and
A.rapplyas aLinOp, and the orthant projection as the Jordan spectral map \(\max(\cdot,0)\) on anElementwiseJordanSpace.Swapping the cone (SOC, PSD) swaps only the projection; the operator algebra is untouched.
That closes the tutorial path: from contexts and spaces, through functionals and structure, to four worked examples — a Tikhonov inverse problem, optimal transport, manifold descent, and conic optimisation — all built from the same handful of typed objects.