1 · Backend and Context#
The idea in one line. In SpaceCore, which array library you compute with is an explicit, swappable object — not a hard-wired
import numpy.
Most numerical Python code bakes a backend into every line:
np.zeros, np.linalg.solve, jnp.dot. Moving such code from
NumPy to JAX (for autodiff/JIT/GPU) or to Torch means a rewrite, and the
rules of the computation — the dtype, what counts as a valid input —
live only in your head.
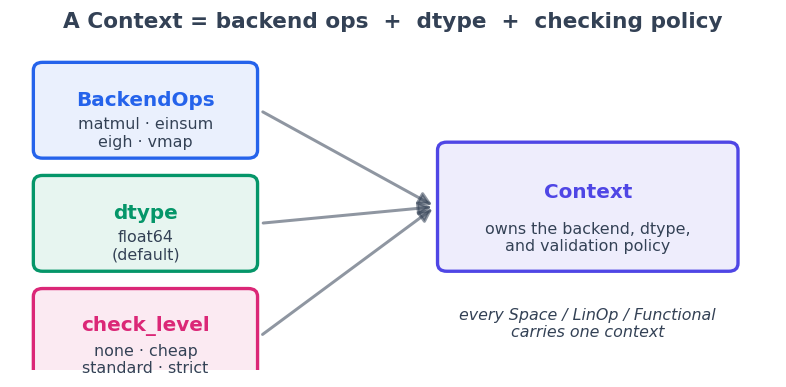
SpaceCore pulls those decisions into one place, the ``Context``:
a ``BackendOps`` — the numerical contract (
matmul,einsum,eigh, …) implemented by NumPy, JAX, Torch, or CuPy;a default ``dtype`` for the arrays you create;
a checking policy (
check_level) that decides how much runtime validation happens.
Every space, operator, and functional you will meet in the next tutorials carries a context. This first notebook is about that foundation: what a context is, how to write code that runs unchanged on two backends, and how to dial validation up or down.
You will learn to
create a
Contextand read its parts;write one function that runs identically on NumPy and JAX through
ctx.ops;use
check_levelto make bugs loud (or silent);move an object from one backend to another with
.convert(...).
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
import spacecore as sc
# A clean, consistent palette + style for every figure in the tutorials.
BLUE, INDIGO, CYAN = "#2563eb", "#4f46e5", "#0891b2"
PINK, AMBER, GREEN = "#db2777", "#d97706", "#059669"
SLATE, GRID = "#334155", "#e5e9f0"
mpl.rcParams.update({
"figure.figsize": (7.2, 4.2), "figure.dpi": 120, "savefig.dpi": 120,
"figure.facecolor": "white", "axes.facecolor": "white",
"axes.edgecolor": SLATE, "axes.linewidth": 1.0,
"axes.grid": True, "axes.axisbelow": True,
"grid.color": GRID, "grid.linewidth": 1.0,
"axes.spines.top": False, "axes.spines.right": False,
"axes.titlesize": 13, "axes.titleweight": "bold", "axes.titlecolor": SLATE,
"axes.labelcolor": SLATE, "axes.labelsize": 11,
"xtick.color": SLATE, "ytick.color": SLATE,
"xtick.labelsize": 10, "ytick.labelsize": 10, "font.size": 11,
"legend.frameon": False, "legend.fontsize": 10,
"lines.linewidth": 2.4, "lines.markersize": 6, "image.cmap": "magma",
})
mpl.rcParams["axes.prop_cycle"] = mpl.cycler(
color=[BLUE, PINK, GREEN, AMBER, INDIGO, CYAN])
print("spacecore", sc.__version__, "| numpy", np.__version__)
spacecore 0.4.0 | numpy 2.4.2
1 · Anatomy of a context#
A context bundles three decisions. The picture below is the mental model to keep.
from matplotlib.patches import FancyBboxPatch, FancyArrowPatch
fig, ax = plt.subplots(figsize=(8.2, 3.6)); ax.axis("off")
ax.set_xlim(0, 10); ax.set_ylim(0, 5)
def box(x, y, w, h, title, sub, color):
p = FancyBboxPatch((x, y), w, h, boxstyle="round,pad=0.02,rounding_size=0.12",
linewidth=2, edgecolor=color, facecolor=color + "18")
ax.add_patch(p)
ax.text(x + w/2, y + h*0.62, title, ha="center", va="center",
fontsize=12, fontweight="bold", color=color)
ax.text(x + w/2, y + h*0.26, sub, ha="center", va="center", fontsize=9.5, color=SLATE)
box(0.3, 3.2, 2.9, 1.4, "BackendOps", "matmul · einsum\neigh · vmap", BLUE)
box(0.3, 1.5, 2.9, 1.4, "dtype", "float64\n(default)", GREEN)
box(0.3, -0.2, 2.9, 1.4, "check_level", "none · cheap\nstandard · strict", PINK)
box(5.6, 1.5, 3.9, 1.9, "Context", "owns the backend, dtype,\nand validation policy", INDIGO)
for y in (3.9, 2.2, 0.5):
ax.add_patch(FancyArrowPatch((3.25, y), (5.55, 2.45), arrowstyle="-|>",
mutation_scale=16, lw=1.8, color=SLATE, alpha=0.55))
ax.text(7.55, 0.7, "every Space / LinOp / Functional\ncarries one context",
ha="center", va="center", fontsize=9.5, style="italic", color=SLATE)
ax.set_title("A Context = backend ops + dtype + checking policy", loc="center")
plt.show()
2 · Create a context and read its parts#
Context(ops, dtype=...) is all you need. NumpyOps is always
available; the others (JaxOps, TorchOps, CuPyOps) appear
only when their optional dependency is installed.
ctx = sc.Context(sc.NumpyOps(), dtype=np.float64)
print("backend family :", ctx.ops.family)
print("default dtype :", ctx.dtype)
print("check level :", ctx.check_level) # direct construction defaults to "standard"
# `asarray` materialises data on this backend at this dtype:
x = ctx.asarray([1.0, 2.0, 3.0])
print("asarray dtype :", x.dtype, "->", x)
backend family : numpy
default dtype : float64
check level : standard
asarray dtype : float64 -> [1. 2. 3.]
The context never owns arrays; it is a small, immutable description of
how to make and check them. ctx.asarray is the canonical way to
bring Python/NumPy data onto the context’s backend and dtype.
3 · BackendOps: one function, two backends#
ctx.ops is the numerical contract. If you write your computation
against it instead of against numpy directly, the same function
runs on any backend. Here is a small routine that builds a Gaussian
kernel matrix and smooths a signal — written once.
def smooth_with_gaussian(ctx, signal, sigma=1.5):
"""Backend-agnostic: only touches ctx.ops and ctx.asarray."""
ops = ctx.ops
x = ctx.asarray(signal)
n = x.shape[0]
idx = ops.arange(0, n, dtype=ctx.dtype)
# pairwise squared distances via broadcasting, then a normalised Gaussian kernel
d2 = (idx[:, None] - idx[None, :]) ** 2
K = ops.exp(-d2 / (2.0 * sigma ** 2))
K = K / ops.sum(K, axis=1)[:, None]
return ops.matmul(K, x), K
rng = np.random.default_rng(0)
raw = np.cumsum(rng.standard_normal(60)) # a noisy random walk
sm_np, K_np = smooth_with_gaussian(ctx, raw)
print("numpy output dtype:", sm_np.dtype)
numpy output dtype: float64
Now run the exact same function through a JAX context. We enable
64-bit mode first so JAX matches NumPy’s float64 (JAX defaults to
float32).
try:
import jax
jax.config.update("jax_enable_x64", True)
ctx_jax = sc.Context(sc.JaxOps(), dtype=jax.numpy.float64)
sm_jax, K_jax = smooth_with_gaussian(ctx_jax, raw) # same function, new backend
max_diff = float(np.max(np.abs(np.asarray(sm_jax) - np.asarray(sm_np))))
HAVE_JAX = True
print("jax output type :", type(sm_jax).__name__)
print("max abs(numpy - jax):", max_diff)
except ImportError:
HAVE_JAX = False
print("JAX not installed — skipping the JAX backend comparison.")
jax output type : ArrayImpl
max abs(numpy - jax): 1.7763568394002505e-15
W0622 05:48:02.899710 11890930 cpp_gen_intrinsics.cc:74] Empty bitcode string provided for eigen. Optimizations relying on this IR will be disabled.
fig, axes = plt.subplots(1, 2, figsize=(9.6, 3.8))
axes[0].plot(raw, color=GRID, lw=1.6, label="noisy signal")
axes[0].plot(np.asarray(sm_np), color=BLUE, label="smoothed (NumpyOps)")
if HAVE_JAX:
axes[0].plot(np.asarray(sm_jax), color=PINK, ls="--", label="smoothed (JaxOps)")
axes[0].set_title("Same routine, two backends"); axes[0].set_xlabel("index")
axes[0].legend(loc="upper left")
im = axes[1].imshow(np.asarray(K_np), cmap="magma")
axes[1].set_title("Gaussian kernel matrix K"); axes[1].set_xlabel("j"); axes[1].set_ylabel("i")
axes[1].grid(False)
fig.colorbar(im, ax=axes[1], fraction=0.046, pad=0.04)
plt.tight_layout(); plt.show()
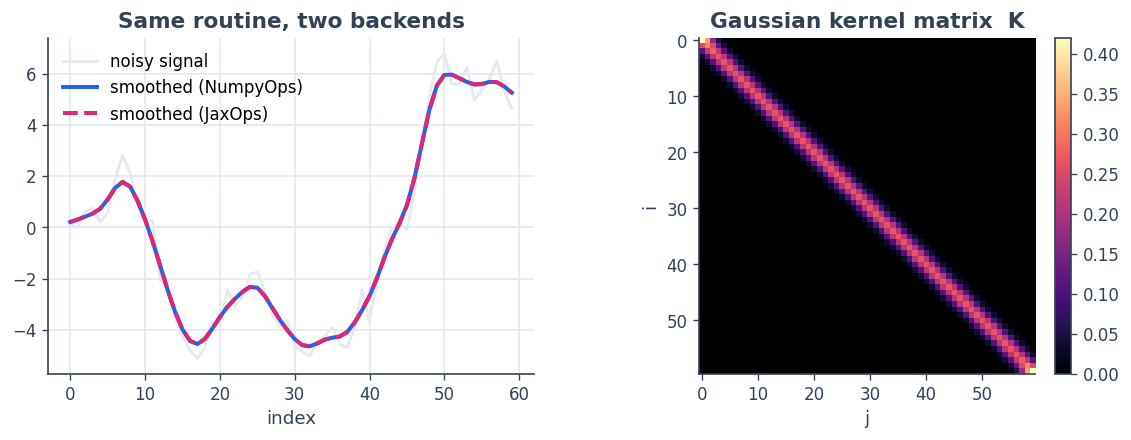
The blue (NumPy) and dashed-pink (JAX) curves lie on top of each other
to ~1e-13. The function never mentioned numpy or jax — only
ctx.ops. That is the whole point of a backend abstraction: write
the math once, choose the engine later.
4 · check_level: how loud should bugs be?#
A context also carries a validation policy. There are four levels, cheapest to strictest:
level |
meaning |
|---|---|
|
no validation — fastest, trust the caller |
|
O(1) structural checks (shape, dtype, backend) |
|
the default — the everyday safety net |
|
adds expensive probes (e.g. adjoint dot-tests) |
The same wrong input is caught at standard but silently accepted at
none.
ctx_checked = sc.Context(sc.NumpyOps(), dtype=np.float64, check_level="standard")
ctx_silent = sc.Context(sc.NumpyOps(), dtype=np.float64, check_level="none")
X_checked = sc.DenseVectorSpace((3,), ctx_checked)
X_silent = sc.DenseVectorSpace((3,), ctx_silent)
wrong = np.zeros(4) # 4 entries for a 3-dimensional space
try:
X_checked.check_member(wrong)
except sc.SpaceValidationError as exc:
print("standard ->", exc)
X_silent.check_member(wrong)
print("none -> accepted silently (no exception raised)")
standard -> Expected shape (3,), got (4,)
none -> accepted silently (no exception raised)
fig, ax = plt.subplots(figsize=(8.6, 2.4)); ax.axis("off")
ax.set_xlim(0, 4); ax.set_ylim(0, 1)
levels = [("none", "trust caller", PINK),
("cheap", "shape / dtype", AMBER),
("standard", "everyday safety", GREEN),
("strict", "+ deep probes", INDIGO)]
for i, (name, sub, color) in enumerate(levels):
ax.add_patch(FancyBboxPatch((i + 0.08, 0.2), 0.84, 0.6,
boxstyle="round,pad=0.02,rounding_size=0.08",
lw=2, edgecolor=color, facecolor=color + "18"))
ax.text(i + 0.5, 0.58, name, ha="center", fontsize=12, fontweight="bold", color=color)
ax.text(i + 0.5, 0.35, sub, ha="center", fontsize=9, color=SLATE)
if i < 3:
ax.annotate("", xy=(i + 1.06, 0.5), xytext=(i + 0.92, 0.5),
arrowprops=dict(arrowstyle="-|>", color=SLATE, lw=1.6))
ax.set_title("check_level: more validation →", loc="left")
plt.show()
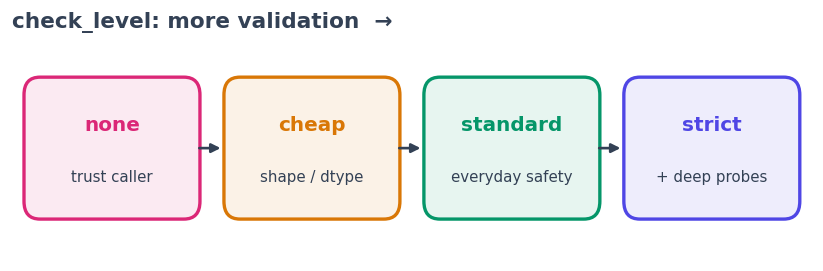
Use none in tight production loops you have already validated, and
standard/strict while developing. (Older code used
enable_checks=True/False; that still works but is deprecated in
favour of check_level.)
5 · Switching backends with .convert(...)#
Because a context is immutable, you do not mutate a backend — you
rebuild an object on a new context. Every SpaceCore object (space,
operator, functional) supports .convert(...), which accepts a
Context, a backend name, or a BackendFamily.
X_np = sc.DenseVectorSpace((3,), ctx) # numpy
print("original :", X_np.ops.family)
if HAVE_JAX:
X_to_jax = X_np.convert("jax") # rebuilt on JAX
print("converted:", X_to_jax.ops.family, "(new object:", X_to_jax is not X_np, ")")
print("same ctx returns self:", X_np.convert(ctx) is X_np)
else:
print("JAX not available; convert('jax') would rebuild this space on JAX.")
original : numpy
converted: jax (new object: True )
same ctx returns self: True
Recap#
A ``Context`` = backend ops + default dtype + checking policy. It is immutable and owns no data.
Writing code against ``ctx.ops`` (not
numpy) makes it backend-portable — we ran one routine on NumPy and JAX with identical results.``check_level`` (
none→strict) trades speed for safety;standardis the default.``.convert(…)`` rebuilds any SpaceCore object on another backend.
Next: 2 · Linear algebra — build spaces and operators and solve a linear system with conjugate gradients.