2 · Linear algebra: spaces, operators, conjugate gradients#
In SpaceCore a space is more than a shape: it knows its geometry (the inner product), how to validate elements, and how to interpret adjoints. An operator is a typed map \(A : X \to Y\) between spaces — not just an array.
This notebook builds the two core objects and uses them to solve a linear system with the conjugate gradient (CG) method, entirely through SpaceCore.
You will learn to
create coordinate spaces with Euclidean and weighted geometry;
read geometry through
inner,norm, and the Riesz map;build operators (
DenseLinOp,DiagonalLinOp) and apply them and their adjoints;solve a symmetric positive-definite system with
sc.cgand watch it converge.
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
import spacecore as sc
# A clean, consistent palette + style for every figure in the tutorials.
BLUE, INDIGO, CYAN = "#2563eb", "#4f46e5", "#0891b2"
PINK, AMBER, GREEN = "#db2777", "#d97706", "#059669"
SLATE, GRID = "#334155", "#e5e9f0"
mpl.rcParams.update({
"figure.figsize": (7.2, 4.2), "figure.dpi": 120, "savefig.dpi": 120,
"figure.facecolor": "white", "axes.facecolor": "white",
"axes.edgecolor": SLATE, "axes.linewidth": 1.0,
"axes.grid": True, "axes.axisbelow": True,
"grid.color": GRID, "grid.linewidth": 1.0,
"axes.spines.top": False, "axes.spines.right": False,
"axes.titlesize": 13, "axes.titleweight": "bold", "axes.titlecolor": SLATE,
"axes.labelcolor": SLATE, "axes.labelsize": 11,
"xtick.color": SLATE, "ytick.color": SLATE,
"xtick.labelsize": 10, "ytick.labelsize": 10, "font.size": 11,
"legend.frameon": False, "legend.fontsize": 10,
"lines.linewidth": 2.4, "lines.markersize": 6, "image.cmap": "magma",
})
mpl.rcParams["axes.prop_cycle"] = mpl.cycler(
color=[BLUE, PINK, GREEN, AMBER, INDIGO, CYAN])
print("spacecore", sc.__version__, "| numpy", np.__version__)
spacecore 0.4.0 | numpy 2.4.2
ctx = sc.Context(sc.NumpyOps(), dtype=np.float64)
1 · A space carries geometry#
DenseVectorSpace((n,), ctx) describes one vector in
\(\mathbb{R}^n\). With the default geometry the inner product is the
ordinary dot product.
X = sc.DenseVectorSpace((3,), ctx)
x = ctx.asarray([3.0, 4.0, 0.0])
y = ctx.asarray([0.0, 1.0, 2.0])
print("shape :", X.shape)
print("<x, y> :", X.inner(x, y)) # dot product
print("||x|| :", X.norm(x)) # sqrt(<x,x>)
print("euclidean? :", X.is_euclidean)
shape : (3,)
<x, y> : 4.0
||x|| : 5.0
euclidean? : True
Weighted geometry changes the ruler#
A weighted inner product keeps the same coordinates but measures them differently: \(\langle x, y\rangle_W = \sum_i w_i\, x_i y_i\). The geometry shows up visually as the shape of the unit ball \(\{x : \|x\|=1\}\) — a circle in Euclidean geometry, an ellipse under weights.
w = ctx.asarray([1.0, 4.0])
Xe = sc.DenseVectorSpace((2,), ctx) # Euclidean
Xw = sc.DenseVectorSpace((2,), ctx, geometry=sc.WeightedInnerProduct(w))
theta = np.linspace(0, 2*np.pi, 256)
circle = np.stack([np.cos(theta), np.sin(theta)]) # Euclidean unit ball
ellipse = circle / np.sqrt(np.asarray(w))[:, None] # weighted unit ball
fig, ax = plt.subplots(figsize=(5.2, 5.2))
ax.plot(*circle, color=BLUE, label=r"$\|x\|_{\mathrm{Euclid}} = 1$")
ax.plot(*ellipse, color=PINK, label=r"$\|x\|_{W} = 1$, $w=(1,4)$")
ax.scatter([0], [0], color=SLATE, s=20, zorder=5)
ax.set_aspect("equal"); ax.set_title("Geometry = the shape of the unit ball")
ax.set_xlabel("$x_1$"); ax.set_ylabel("$x_2$"); ax.legend(loc="upper right")
plt.show()
print("Euclidean ||(0,1)|| :", float(Xe.norm(ctx.asarray([0.0, 1.0]))))
print("Weighted ||(0,1)|| :", float(Xw.norm(ctx.asarray([0.0, 1.0]))), " (= sqrt(4))")
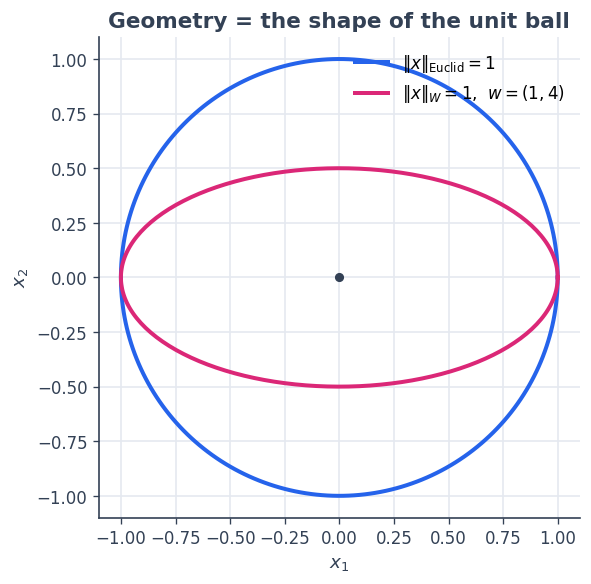
Euclidean ||(0,1)|| : 1.0
Weighted ||(0,1)|| : 2.0 (= sqrt(4))
The Riesz map turns a coordinate vector into the dual vector that represents it under the geometry. For Euclidean geometry it is the identity; for weights \(w\) it multiplies by \(w\). It is what makes gradients and adjoints metric-aware (you will use it in tutorials 3 and 6).
v = ctx.asarray([1.0, 1.0])
print("Euclidean riesz:", Xe.riesz(v)) # identity
print("Weighted riesz:", Xw.riesz(v)) # multiply by w = (1, 4)
Euclidean riesz: [1. 1.]
Weighted riesz: [1. 4.]
2 · Operators are typed maps \(A : X \to Y\)#
DenseLinOp(A, dom, cod, ctx) wraps a matrix as a map between
spaces. apply is the forward map; rapply is the adjoint with
respect to the spaces’ inner products (for Euclidean spaces this is
the ordinary transpose; see design/geometry
for the metric case).
M = ctx.asarray([[2.0, 1.0],
[1.0, 3.0]])
X2 = sc.DenseVectorSpace((2,), ctx)
A = sc.DenseLinOp(M, X2, X2, ctx)
u = ctx.asarray([1.0, 0.0])
print("A u :", A.apply(u))
print("A* (1,1) :", A.rapply(ctx.asarray([1.0, 1.0]))) # adjoint
print("hermitian? :", A.is_hermitian())
# A diagonal operator only stores its diagonal:
D = sc.DiagonalLinOp(ctx.asarray([2.0, 0.5]), X2, ctx)
print("D (1,1) :", D.apply(ctx.asarray([1.0, 1.0])))
A u : [2. 1.]
A* (1,1) : [3. 4.]
hermitian? : True
D (1,1) : [2. 0.5]
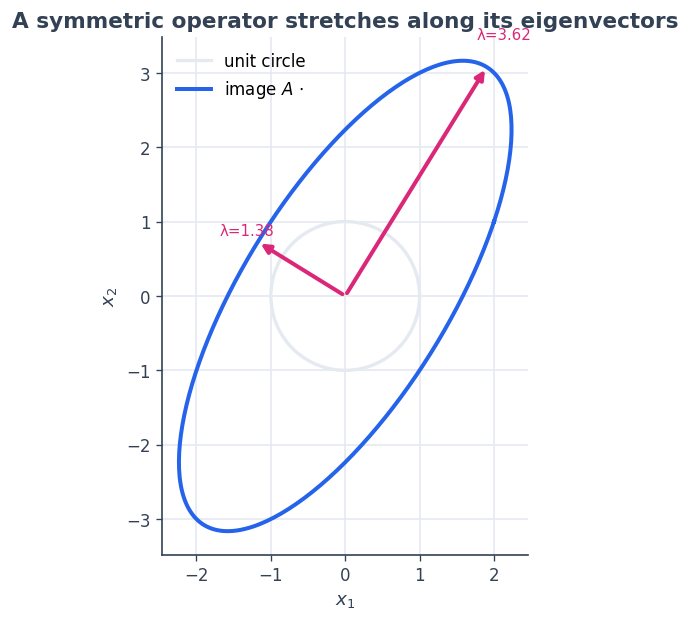
Seeing an operator as a deformation#
A linear map sends the unit circle to an ellipse whose axes are the eigenvectors of \(A\), stretched by its eigenvalues. Visualising that makes “operator” concrete.
pts = circle # reuse the unit circle from before
img = np.asarray(A.to_dense()) @ pts
evals, evecs = np.linalg.eigh(np.asarray(M))
fig, ax = plt.subplots(figsize=(5.6, 5.6))
ax.plot(*pts, color=GRID, lw=2, label="unit circle")
ax.plot(*img, color=BLUE, label=r"image $A\,\cdot$")
for lam, vec in zip(evals, evecs.T):
ax.annotate("", xy=lam*vec, xytext=(0, 0),
arrowprops=dict(arrowstyle="-|>", color=PINK, lw=2.4))
ax.text(*(lam*vec*1.12), f"λ={lam:.2f}", color=PINK, fontsize=9, ha="center")
ax.set_aspect("equal"); ax.set_title("A symmetric operator stretches along its eigenvectors")
ax.set_xlabel("$x_1$"); ax.set_ylabel("$x_2$"); ax.legend(loc="upper left")
plt.show()
3 · Solving \(A x = b\) with conjugate gradients#
sc.cg expects a square, symmetric, positive-definite operator and
solves \(Ax = b\) using only A.apply and the domain inner
product — it never forms \(A^{-1}\). We build a classic SPD example:
a 1-D discrete Laplacian (tridiagonal \(2,-1\)).
n = 40
lap = (2.0 * np.eye(n) - np.eye(n, k=1) - np.eye(n, k=-1))
Xn = sc.DenseVectorSpace((n,), ctx)
L = sc.DenseLinOp(ctx.asarray(lap), Xn, Xn, ctx)
b = ctx.asarray(np.ones(n))
res = sc.cg(L, b, tol=1e-10, maxiter=n)
print("converged :", bool(res.converged))
print("iterations :", int(res.num_iters))
print("residual :", float(res.residual_norm))
print("check Ax≈b :", np.allclose(np.asarray(L.apply(res.x)), np.asarray(b)))
converged : True
iterations : 40
residual : 7.869487166620889e-29
check Ax≈b : True
To watch CG converge we ask it for the residual after \(k\) steps,
for \(k = 1, 2, \dots\) (re-running from scratch with tol=0 so
it always takes exactly \(k\) iterations). The residual drops
sharply once CG has explored enough of the Krylov subspace.
ks = np.arange(1, n + 1)
hist = [float(sc.cg(L, b, tol=0.0, atol=0.0, maxiter=int(k), check_every=1).residual_norm)
for k in ks]
fig, axes = plt.subplots(1, 2, figsize=(10.2, 4.0))
axes[0].semilogy(ks, hist, color=BLUE, marker="o", ms=3)
axes[0].axhline(1e-10, color=PINK, ls="--", lw=1.4, label="tol = 1e-10")
axes[0].set_title("CG residual $\\|b - A x_k\\|$"); axes[0].set_xlabel("iteration $k$")
axes[0].set_ylabel("residual (log)"); axes[0].legend()
axes[1].plot(np.asarray(res.x), color=INDIGO)
axes[1].fill_between(np.arange(n), np.asarray(res.x), color=INDIGO, alpha=0.12)
axes[1].set_title("Solution $x = L^{-1}\\mathbf{1}$"); axes[1].set_xlabel("index")
axes[1].set_ylabel("value")
plt.tight_layout(); plt.show()
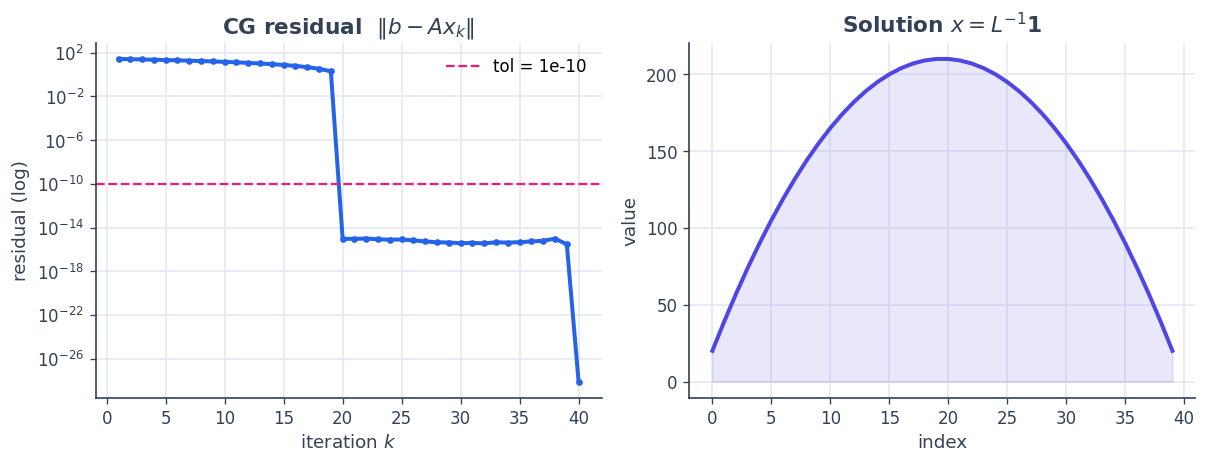
The solution is the smooth “tent” you expect from inverting a Laplacian against a constant load — recovered with a handful of operator applications and no explicit matrix inverse.
Recap#
A space owns geometry:
inner,norm,riesz, andis_euclidean. Weighting the inner product reshapes the unit ball.An operator \(A : X \to Y\) has
apply(forward) andrapply(metric adjoint), and can be materialised withto_dense().``sc.cg`` solves SPD systems matrix-free, using only
applyand the space’s inner product.
Next: 3 · Functionals — scalar objectives, metric-aware gradients, and gradient descent.