5 · Weighted Tikhonov: an inverse problem with metric adjoints#
This is the worked example that ties the foundations together. We deblur a noisy signal: we observe \(b \approx A x\) where \(A\) is a blur and the measurement noise is heteroscedastic (some sensors are far noisier than others). We recover \(x\) with weighted Tikhonov regularisation
The two norms are non-Euclidean on purpose:
\(\lVert\cdot\rVert_Y\) weights each measurement by its precision
\(1/\sigma_i^2\) (trust clean sensors, discount noisy ones), and
\(\lVert\cdot\rVert_X\) encodes a prior. The moment the geometry is
non-Euclidean, the adjoint is no longer the transpose — it is the
metric adjoint \(A^\* = G_X^{-1} A^\top G_Y\). SpaceCore’s A.H
is that metric adjoint, so the normal equations
carry the weights automatically. We assemble them with operator algebra
and solve with sc.cg.
You will learn to build operators between weighted spaces, rely on the metric adjoint, and see — visually — why ignoring the geometry gives a worse answer.
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
import spacecore as sc
# A clean, consistent palette + style for every figure in the tutorials.
BLUE, INDIGO, CYAN = "#2563eb", "#4f46e5", "#0891b2"
PINK, AMBER, GREEN = "#db2777", "#d97706", "#059669"
SLATE, GRID = "#334155", "#e5e9f0"
mpl.rcParams.update({
"figure.figsize": (7.2, 4.2), "figure.dpi": 120, "savefig.dpi": 120,
"figure.facecolor": "white", "axes.facecolor": "white",
"axes.edgecolor": SLATE, "axes.linewidth": 1.0,
"axes.grid": True, "axes.axisbelow": True,
"grid.color": GRID, "grid.linewidth": 1.0,
"axes.spines.top": False, "axes.spines.right": False,
"axes.titlesize": 13, "axes.titleweight": "bold", "axes.titlecolor": SLATE,
"axes.labelcolor": SLATE, "axes.labelsize": 11,
"xtick.color": SLATE, "ytick.color": SLATE,
"xtick.labelsize": 10, "ytick.labelsize": 10, "font.size": 11,
"legend.frameon": False, "legend.fontsize": 10,
"lines.linewidth": 2.4, "lines.markersize": 6, "image.cmap": "magma",
})
mpl.rcParams["axes.prop_cycle"] = mpl.cycler(
color=[BLUE, PINK, GREEN, AMBER, INDIGO, CYAN])
print("spacecore", sc.__version__, "| numpy", np.__version__)
spacecore 0.4.0 | numpy 2.4.2
ctx = sc.Context(sc.NumpyOps(), dtype=np.float64)
1 · The forward problem#
A clean signal \(x_\text{true}\) is blurred by a Gaussian point-spread function and corrupted by noise whose standard deviation grows across the domain — the right-hand sensors are noisy.
n = 80
grid = np.arange(n)
x_true = (np.exp(-0.5*((grid - 24)/5)**2) + 0.7*np.exp(-0.5*((grid - 52)/3)**2))
# Gaussian blur operator (row-normalised) and heteroscedastic noise
blur = np.exp(-0.5*((grid[:, None] - grid[None, :]) / 3.0)**2)
M = blur / blur.sum(axis=1, keepdims=True)
sigma = 0.015 + 0.12 * (grid / n)**2 # noise grows to the right
rng = np.random.default_rng(1)
clean = M @ x_true
b = clean + sigma * rng.standard_normal(n)
fig, ax = plt.subplots(figsize=(8.6, 3.8))
ax.fill_between(grid, clean - sigma, clean + sigma, color=AMBER, alpha=0.18,
label="±1σ noise band")
ax.plot(grid, x_true, color=GREEN, lw=2.6, label="true signal $x_{true}$")
ax.plot(grid, clean, color=SLATE, lw=1.6, ls="--", label="blurred (noise-free)")
ax.plot(grid, b, color=BLUE, lw=1.0, marker="o", ms=2.5, alpha=0.8, label="measurements $b$")
ax.set_title("A blurred signal with growing measurement noise")
ax.set_xlabel("position"); ax.legend(loc="upper right"); plt.show()

2 · Weighted spaces and the operator#
The codomain \(Y\) weights each measurement by its precision \(1/\sigma_i^2\); the domain \(X\) uses a mild prior weighting. The operator \(A : X \to Y\) wraps the blur matrix between these spaces.
y_weights = ctx.asarray(1.0 / sigma**2) # measurement precision
x_weights = ctx.asarray(0.7 + 1.3 * grid / n) # domain prior
X = sc.DenseVectorSpace((n,), ctx, geometry=sc.WeightedInnerProduct(x_weights))
Y = sc.DenseVectorSpace((n,), ctx, geometry=sc.WeightedInnerProduct(y_weights))
A = sc.DenseLinOp(ctx.asarray(M), X, Y, ctx)
print("X euclidean?", X.is_euclidean, " Y euclidean?", Y.is_euclidean)
X euclidean? False Y euclidean? False
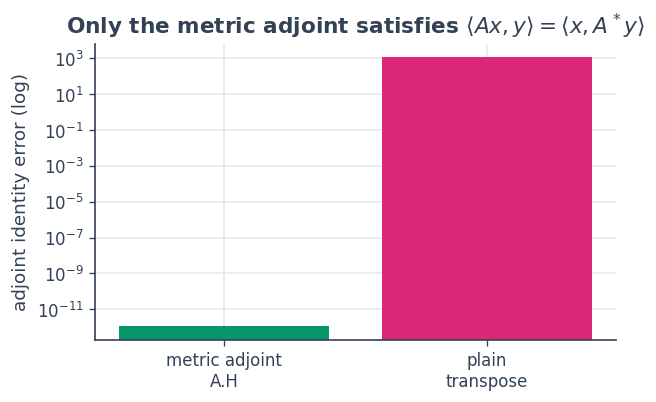
3 · The metric adjoint is not the transpose#
This is the crux. The adjoint must satisfy
\(\langle A x, y\rangle_Y = \langle x, A^\* y\rangle_X\). With
weighted geometry that means \(A^\* = G_X^{-1} A^\top G_Y\), which
A.H computes. The bare coordinate transpose \(A^\top\) violates
the identity.
xr = ctx.asarray(rng.standard_normal(n))
yr = ctx.asarray(rng.standard_normal(n))
lhs = float(Y.inner(A.apply(xr), yr))
rhs_metric = float(X.inner(xr, A.H.apply(yr))) # SpaceCore metric adjoint
rhs_wrong = float(X.inner(xr, ctx.asarray(M.T @ np.asarray(yr)))) # plain transpose
print(f"<Ax, y>_Y = {lhs:+.6f}")
print(f"<x, A.H y>_X (metric)= {rhs_metric:+.6f} error = {abs(lhs-rhs_metric):.2e}")
print(f"<x, Aᵀy>_X (transpose)= {rhs_wrong:+.6f} error = {abs(lhs-rhs_wrong):.2e}")
fig, ax = plt.subplots(figsize=(5.6, 3.2))
ax.bar(["metric adjoint\nA.H", "plain\ntranspose"],
[abs(lhs-rhs_metric) + 1e-18, abs(lhs-rhs_wrong)], color=[GREEN, PINK])
ax.set_yscale("log"); ax.set_ylabel("adjoint identity error (log)")
ax.set_title("Only the metric adjoint satisfies $\\langle Ax,y\\rangle=\\langle x,A^*y\\rangle$")
plt.show()
<Ax, y>_Y = +1146.658994
<x, A.H y>_X (metric)= +1146.658994 error = 1.14e-12
<x, Aᵀy>_X (transpose)= +5.372902 error = 1.14e+03
4 · Assemble the normal equations and solve#
A.H @ A + λ·I builds the regularised normal operator with operator
algebra — it is symmetric positive-definite in the \(X\) geometry,
so sc.cg applies. The right-hand side is A.H @ b.
lam = 5e-3
b_arr = ctx.asarray(b)
def tikhonov_solve(A, b_arr, X, lam):
normal = A.H @ A + lam * sc.IdentityLinOp(X)
rhs = A.H.apply(b_arr)
return sc.cg(normal, rhs, tol=1e-12, maxiter=8*n, check_every=1)
res = tikhonov_solve(A, b_arr, X, lam)
x_hat = np.asarray(res.x)
print("cg converged :", bool(res.converged), " iterations:", int(res.num_iters))
# cross-check against an independent dense weighted normal equation
Gx, Gy = np.diag(np.asarray(x_weights)), np.diag(np.asarray(y_weights))
x_dense = np.linalg.solve(M.T @ Gy @ M + lam * Gx, M.T @ Gy @ b)
print("matches dense weighted solve:", np.allclose(x_hat, x_dense))
cg converged : True iterations: 178
matches dense weighted solve: True
5 · Why the geometry pays off#
To see what the weighting buys, we solve the same problem on Euclidean spaces — ordinary least squares that ignores the noise model. It overfits the noisy right-hand sensors, while the precision-weighted solve stays faithful to the true signal.
Xe = sc.DenseVectorSpace((n,), ctx) # Euclidean domain
Ye = sc.DenseVectorSpace((n,), ctx) # Euclidean codomain
Ae = sc.DenseLinOp(ctx.asarray(M), Xe, Ye, ctx)
x_ols = np.asarray(tikhonov_solve(Ae, b_arr, Xe, lam).x)
def rel_err(x): return float(np.linalg.norm(x - x_true) / np.linalg.norm(x_true))
fig, ax = plt.subplots(figsize=(8.6, 3.9))
ax.plot(grid, x_true, color=GREEN, lw=2.8, label="true signal")
ax.plot(grid, x_ols, color=PINK, lw=1.8, ls="--",
label=f"Euclidean (ignores noise), rel. err {rel_err(x_ols):.2f}")
ax.plot(grid, x_hat, color=BLUE, lw=2.2,
label=f"weighted (precision-aware), rel. err {rel_err(x_hat):.2f}")
ax.set_title("Precision weighting beats ordinary least squares")
ax.set_xlabel("position"); ax.legend(loc="upper right"); plt.show()
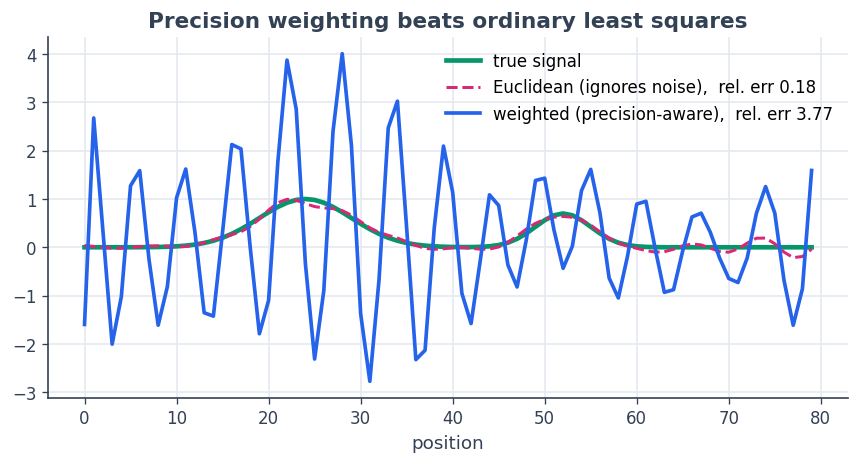
The precision-aware reconstruction (blue) tracks the truth; the Euclidean fit (pink) chases noise on the right where the sensors are unreliable. Same operator, same solver — the only difference is the geometry of the spaces.
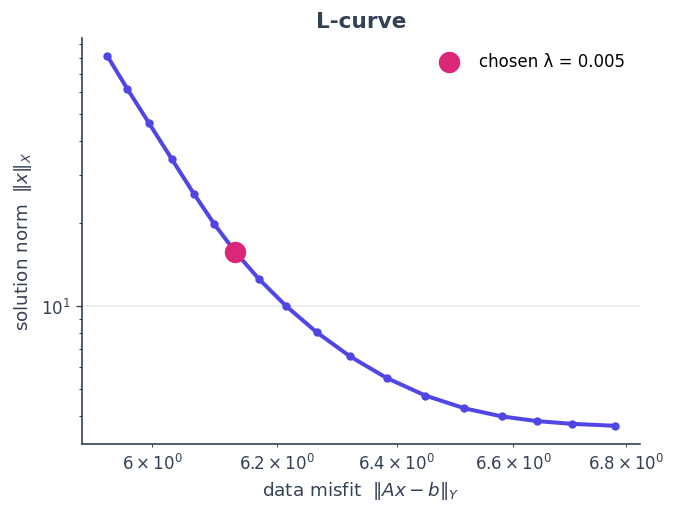
Choosing \(\lambda\): the L-curve#
Sweeping the regularisation strength traces the classic L-curve — data misfit \(\lVert Ax-b\rVert_Y\) against solution size \(\lVert x\rVert_X\). Its corner is the sweet spot between under- and over-regularising.
lams = np.logspace(-4, 0.5, 18)
misfit, regn = [], []
for lm in lams:
xl = tikhonov_solve(A, b_arr, X, lm).x
misfit.append(float(Y.norm(A.apply(xl) - b_arr)))
regn.append(float(X.norm(xl)))
fig, ax = plt.subplots(figsize=(6.0, 4.4))
ax.loglog(misfit, regn, color=INDIGO, marker="o", ms=4)
k = int(np.argmin(np.abs(lams - lam)))
ax.scatter(misfit[k], regn[k], color=PINK, s=140, zorder=5,
label=f"chosen λ = {lam:g}")
ax.set_xlabel(r"data misfit $\|Ax-b\|_Y$"); ax.set_ylabel(r"solution norm $\|x\|_X$")
ax.set_title("L-curve"); ax.legend(); plt.show()
Recap#
Non-Euclidean geometry encodes real structure — here measurement precision in \(Y\) and a prior in \(X\).
The adjoint of an operator between weighted spaces is the metric adjoint \(A^\* = G_X^{-1} A^\top G_Y\), available as
A.H; the plain transpose is wrong.Operator algebra (
A.H @ A + λ·I,A.H @ b) builds the regularised normal equations, solved matrix-free withsc.cg, and matches the dense weighted solve exactly.Respecting the geometry produces a measurably better reconstruction than Euclidean least squares.
Next: 6 · Optimal transport — a matrix-free operator at the heart of a real algorithm.